執筆者
K.S.
建設・土木の活用事例

6 建設・土木
◆現場監視と安全管理で事故ゼロへ
建設現場では、安全管理と進捗管理がディープラーニングの主要な適用領域です。
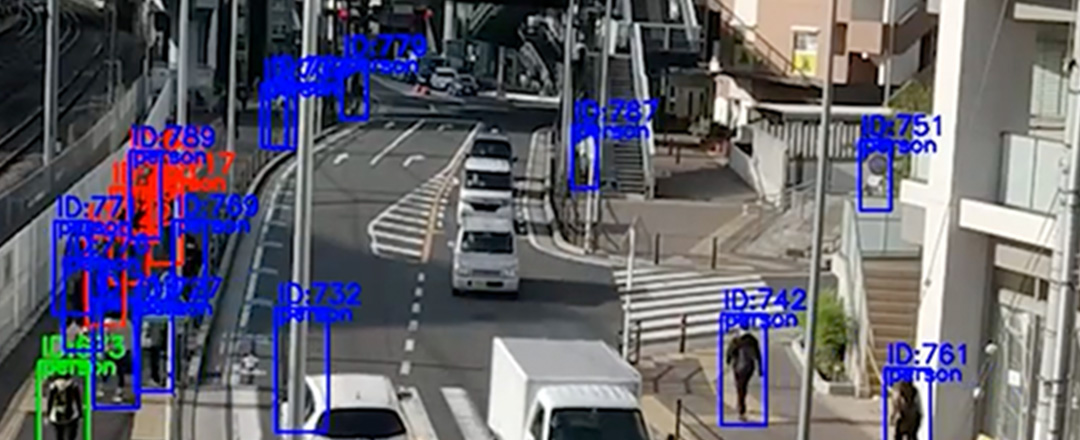
工事現場にカメラを設置し、作業員の安全装備着用状況(ヘルメット、安全帯など)を自動チェック。危険エリアへの立ち入りを検知し、即座にアラートを発信することで、労働災害を未然に防ぎます。
従来は安全管理者が目視で巡回していた業務が自動化され、管理の質と効率が同時に向上します。
◆多角的なAI活用で現場を変革
建設現場におけるAI活用は、安全・進捗・品質の3つの軸で展開されます。それぞれが独立して効果を発揮しながら、統合的に運用することでさらに大きな価値を生み出します。
ドローンによる空撮画像をAIで解析し、工事進捗を自動測定することも可能です。設計図面と実際の施工状況を比較し、遅延箇所や施工ミスを早期発見。週次や月次の報告書作成業務が大幅に効率化されます。
01 建設現場の安全確認(AIカメラ)
【用途例】
・ヘルメット着用チェック、立入禁止区域の監視
【低コスト化のポイント】
・YOLO+クラウドカメラで安価に構築
【開発期間】
・1〜1.5ヶ月
02 重機の動きの監視
【用途例】
・危険エリアへの侵入判定
【低コスト化のポイント】
・既存カメラ映像をAI分析するだけで実現
【開発期間】
・3〜4週間
インフラの保守点検にもディープラーニングが活用されています。
橋梁やトンネルのひび割れをドローンやロボットで撮影し、AIが自動検出。人が近づきにくい高所や危険箇所の点検が安全かつ効率的に実施できます。
点検頻度が上がることで、重大事故につながる劣化を早期に発見し、予防保全が可能になります。初期投資は数百万円程ですが、人件費削減と事故リスク低減により、十分な投資価値があります。
Elviss(エルビス)
Elviss(映像による点検支援システム)
◆ドローン点検映像の調査業務を効率化し、コスト削減・生産性向上を実現
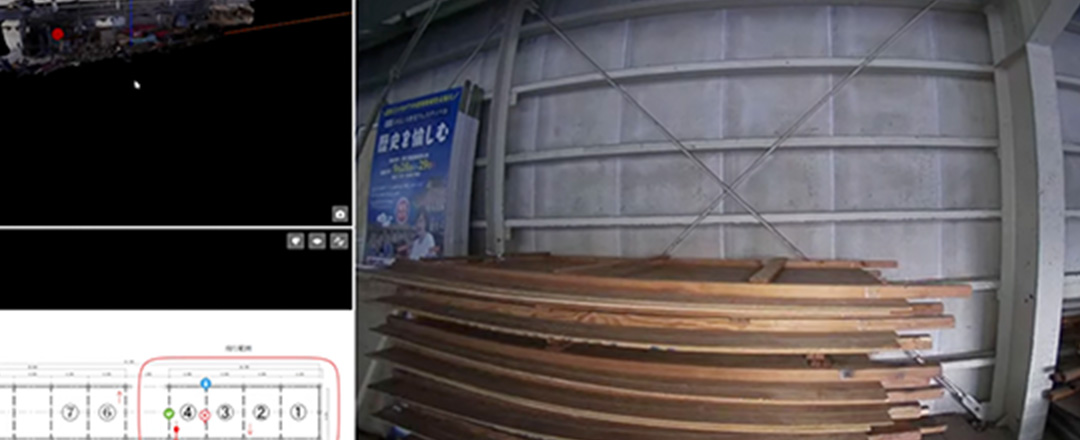
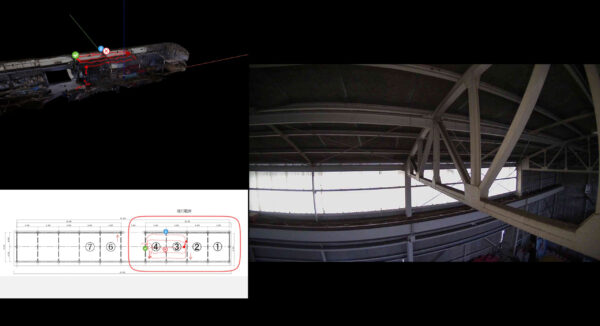
ELVISSは、ドローンで撮影した点検用映像から撮影位置を推定し、地図上に記録・可視化するクラウド型調査支援システムです。
ドローン点検映像の調査業務を効率化し、コスト削減・生産性向上を実現していきます。
サービスの特徴
01 高精度な位置情報の取得とマッピング
自己位置推定システムであるMINA Systemと連携し、VSLAMを根幹に高精度に位置情報を取得します。位置情報は3D映像との統合や点群地図への展開など幅広いカスタマイズに対応しています。
02 映像と位置情報を統合したデータ管理
撮影映像を位置情報とともにクラウド上で一元管理。
撮影時期やルートに関わらず同一視点での経年比較が可能になり、維持管理の高度化に貢献します。
03 複雑で多様な現場への柔軟な対応力
狭所・高所・複雑構造・GPS不感地など、多様な環境に対応。
事前に細かい飛行ルートを設定せずとも、撮影後の映像から位置特定ができるため、自由度の高い点検が可能です。
04 ワンストップ対応
ドローン撮影から映像解析、システム反映までを一貫対応。
現場に専門知識がなくても導入しやすく、点検体制の標準化や属人化の解消にもつながります。
技術の特徴(特許出願中)
01 ドローンによる空撮技術
建設業に精通したオペレーターによる撮影で、現場環境や構造物の特性を的確に捉えた映像記録が可能です。
安全管理・撮影精度・飛行計画において高い品質を維持しており、法令遵守と安定運用を両立いたします。
02 自己位置推定 & マッピング
ELVISSの解析基盤には、構造物調査に特化したMina Systemを採用。
自分の位置や方向と周辺の物体の位置情報を3次元で把握する技術(VSLAM)を根幹に、位置情報を取得します。
また、取得した位置情報は3D地図との統合や、点群地図への展開が可能な他、移動位置、軌跡、停滞情報の可視化も可能です。
03 様々な環境下に適応可能
高所や狭小空間など、調査に時間やコストがかかっていた現場こそ、ドローンの活用が真価を発揮します。
ELVISSは、従来の手法では非効率だった調査を、よりスマートかつ低負担で行えます。
04 経年変化の可視化に対応
映像ごとに異なる撮影位置を特定・記録し、全ての映像を地図情報と統合管理します。そのため、撮影時期や条件、飛行経路に依存せず、同一地点・同一視点の経年比較が可能です。これにより、劣化の進行や補修効果などを正確に把握できます。
利用シーン(実績・実例)
これまで多くの手間やコストを要していた点検業務を、ドローン映像と位置情報の連携により効率化。
さまざまな環境・構造に柔軟に対応できるため、再現性の高い調査と記録が可能になり、業務品質の安定化と省力化を同時に実現します。
Case 01 橋梁上部などの高所
高所作業の安全性やコストが課題。足場不要で効率的な点検が可能になります。
Case 02 屋根裏などの狭小部
人が入りにくい空間でも、映像から位置を把握し確実な記録が可能になります。
Case 03 目視困難な箇所
複雑構造や死角の確認に時間を要していた課題を、位置連動映像で解決します。
Case 04 プラント施設・配管周り
入り組んだ構造の中でも、自由な飛行で点検作業の自由度と精度を向上させます。
Case 05 トンネル・地下空間
GPSが届かない場所でも、映像解析で正確な位置記録と比較が可能になります。
MINA System(ミイナ システム)
MINA System(単眼カメラによる位置推定と地図管理)
◆単眼カメラによる高度な位置推定と地図管理テクノロジー
センサーデータから人や移動するモノなどの位置情報をリアルタイムに推定し可視化することで、作業監視や導線把握といった業務改善にご活用いただけるサービスです。
MINAシステムは、高額な機材や専門的なスキルを必要とせず、手軽に高精度な位置情報を取得可能です。
屋内や複雑な環境でも、カメラ映像を中心とした複数のセンサーを活用し正確に計測することができます。
また、地図の可視化方法や運用内容をお客様の業務に合わせて柔軟にカスタマイズできる点も大きな魅力です。
清掃業や物流、建設現場など、リアルタイムの位置情報を必要とする幅広い分野で効率化、安全管理、コスト削減に貢献します。
サービスの特徴
01 高精度な位置情報を取得
カメラで撮影された映像データから、自分の位置や方向と周辺の物体の位置情報を3次元で把握する技術(VSLAM)を根幹に、様々なソースを参照して位置情報を取得します。
02 リアルタイム計測
取得データを分割することで容量を最小限に抑えることができます。そのため、実行環境への依存度が低く、どのような環境下でもリアルタイムに高精度の可視化が可能です。
03 カスタマイズ可能なマッピング
マップ上への位置情報の可視化方法はお客様のご要望に合わせてカスタマイズ可能です。
04 特殊機材・スキル不要
高額な機材をご用意いただくことなく、お客様のスマホで撮影された映像から位置測定が可能です。測定データの可視化においても弊社エンジニアが対応いたしますので、お客様に特殊な設定などを行なっていただくこともございません。
技術の特徴(特許取得)
01 センサーフュージョンによる正確性
VSLAMをメインに、Wi-Fi AP、気圧、GNSSといった複数のセンサーを組み合わせて自己位置推定を行います。
それにより、屋内外、空間の明暗を問わず、様々な環境において高精度な測定が可能です。
02 高速情報処理によるリアルタイム性
小さく分割作成された点群地図を切り替えながら自己位置推定できます。地図1つあたりのデータ量を減らせるため、情報処理の負荷を抑え、高精度かつリアルタイム性を維持することができます。
03 カスタマイズ可能なマッピング
位置情報のマッピングは平面地図上だけでなく3D映像と統合することができます。また、ヒートマップによる停滞情報の可視化や、軌跡の可視化などのカスタマイズも可能です。
利用シーン(実績・実例)
リアルタイムの位置把握ができるため、作業現場など即時対応が求められるシーンでもご活用いただけます。
Case 01 AGVの監視
AGV(無人搬送車)の導線を監視することで、荷下ろしや走行中に発生する渋滞や滞留の原因を特定し、適切な導線や配置の設計に生かすことができます。
Case 02 巡回員の位置把握
大規模ビル内での巡回員の位置情報をリアルタイムに確認することで、人員配置を適切に行うことができ、人件費の削減が見込めます。
Case 03 作業員の位置管理
建設現場、設備メンテナンス現場での作業員の安全のための位置管理や、修繕箇所の確認などに利用可能です。